


























-
–≠–ї–µ–Ї—В—А–Њ–Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є–є —Г–љ–Є–≤–µ—А—Б–∞–ї—М–љ—Л–є —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ
- –У–Є–і—А–∞–≤–ї–Є—З–µ—Б–Ї–∞—П —Г–љ–Є–≤–µ—А—Б–∞–ї—М–љ–∞—П —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ
- –Р–≤—В–Њ–Љ–∞—В–Є–Ј–Є—А–Њ–≤–∞–љ–љ—Л–µ —Б–Є—Б—В–µ–Љ—Л —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є—П
-
–У–Њ—А–Є–Ј–Њ–љ—В–∞–ї—М–љ–∞—П –Љ–∞—И–Є–љ–∞ –і–ї—П –Є—Б–њ—Л—В–∞–љ–Є–є –љ–∞ —А–∞—Б—В—П–ґ–µ–љ–Є–µ
-
–≠–ї–∞—Б—В–Њ–Љ–µ—А–љ–∞—П –Љ–∞—И–Є–љ–∞ –і–ї—П —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є—П –њ–Њ–і—И–Є–њ–љ–Є–Ї–Њ–≤
-
–Ь–∞—И–Є–љ–∞ –і–ї—П —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є—П —Б–ґ–∞—В–Є—П
-
–Ь–∞—И–Є–љ–∞ –і–ї—П –Є—Б–њ—Л—В–∞–љ–Є–є –љ–∞ –њ–Њ–ї–Ј—Г—З–µ—Б—В—М
- –°–Є—Б—В–µ–Љ—Л –Є—Б–њ—Л—В–∞–љ–Є–є –≤–Њ–Ј–і–µ–є—Б—В–≤–Є—П
-
–Ф–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–µ —Б–Є—Б—В–µ–Љ—Л —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є—П
-
–Ґ–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ
-
–Ш–Ј–≥–Є–±–∞—П —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ –Љ–∞—И–Є–љ–∞
- Special Testing Machine
- –Э–µ—А–µ—В–∞–ї–ї–Є—З–µ—Б–Ї–∞—П —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є–µ
- –Ґ–µ—Б—В–µ—А —В–≤–µ—А–і–Њ—Б—В–Є
- –Ь–µ—В–∞–ї–ї–Њ–≥—А–∞—Д–Є—З–µ—Б–Ї–Њ–µ –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є–µ –і–ї—П –њ–Њ–і–≥–Њ—В–Њ–≤–Ї–Є
-
–Ь–Є–Ї—А–Њ—Б–Ї–Њ–њ
–Ф–≤–Њ–є–љ–∞—П —Б—В–∞–љ—Ж–Є—П
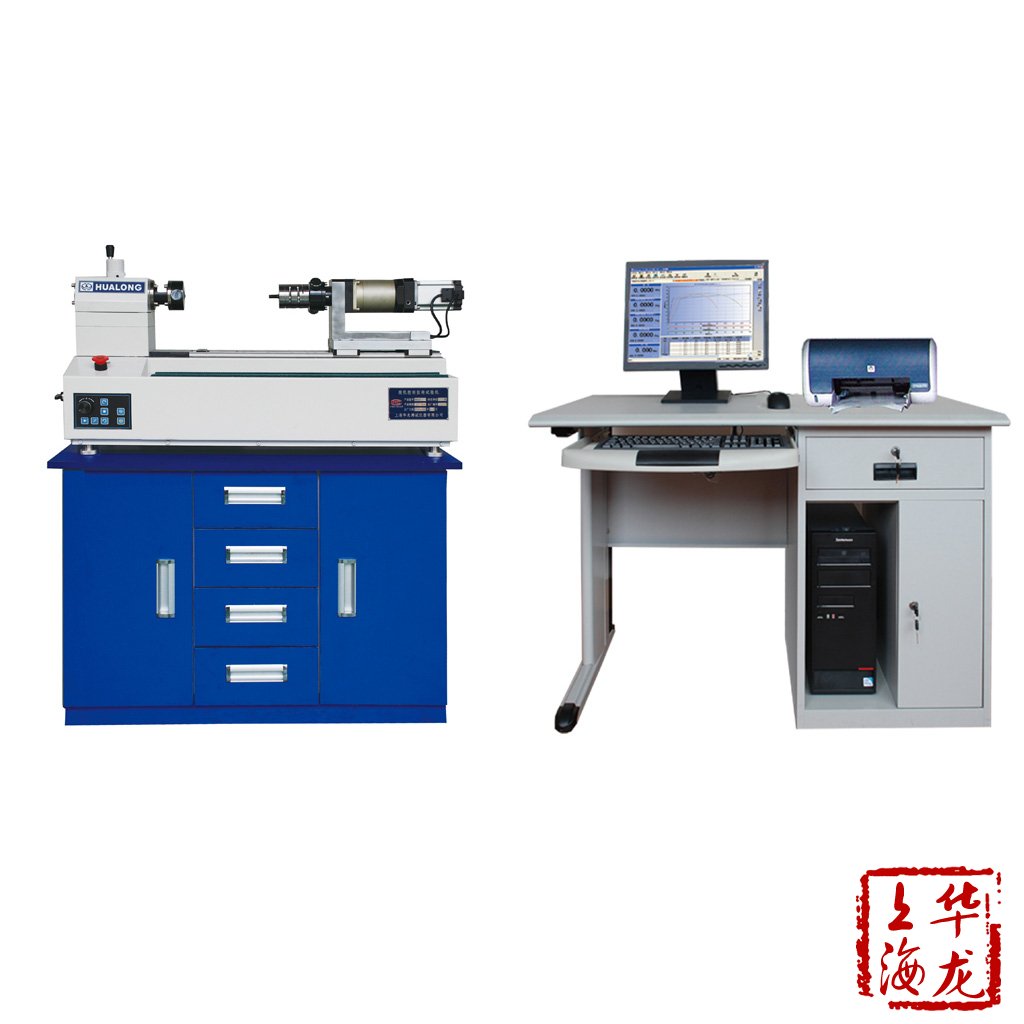
–° –і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–Љ –Њ—В–Њ–±—А–∞–ґ–µ–љ–Є–µ–Љ –Є —Г–њ—А–∞–≤–ї—П–µ–Љ—Л–Љ–Є —Д—Г–љ–Ї—Ж–Є—П–Љ–Є –Ї—А—Г—В—П—Й–µ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞, —Г–≥–ї–Њ–Љ –Ї—А—Г—З–µ–љ–Є—П –Є –Ї—А–Є–≤–Њ–є –Є—Б–њ—Л—В–∞–љ–Є–є.
–Ю–љ –Є–Љ–µ–µ—В –њ—А–Њ–Є–Ј–≤–Њ–ї—М–љ—Г—О –Њ–±—Б—В–∞–љ–Њ–≤–Ї—Г —Б —Г–≥–ї–Њ–Љ –њ–Њ–≤–Њ—А–Њ—В–∞, –і–Њ—Б—В–Є–≥–∞–µ—В —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ–Њ–≥–Њ –Ј–љ–∞—З–µ–љ–Є—П –Є –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є –њ–Њ–і–і–µ—А–ґ–Є–≤–∞–µ—В —Д—Г–љ–Ї—Ж–Є—О.
–Я—А–Є –њ—А–Њ–Є–Ј–≤–Њ–ї—М–љ–Њ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ–Њ–Љ –Ј–љ–∞—З–µ–љ–Є–Є –Ї—А—Г—В—П—Й–µ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ–Њ–µ –Ј–љ–∞—З–µ–љ–Є–µ –і–Њ—Б—В–Є–≥–∞–µ—В—Б—П, –Є —Д—Г–љ–Ї—Ж–Є—П –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є –њ–Њ–і–і–µ—А–ґ–Є–≤–∞–µ—В—Б—П.
–Ю–љ –Є–Љ–µ–µ—В –ї—О–±—Г—О –љ–∞—Б—В—А–Њ–є–Ї—Г –і–ї—П –Ј–∞—В—П–≥–Є–≤–∞–љ–Є—П –љ–∞–≥—А—Г–Ј–Ї–Є, –і–Њ—Б—В–Є–≥–∞–µ—В —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ–Њ–≥–Њ –Ј–љ–∞—З–µ–љ–Є—П –Є –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є –њ–Њ–і–і–µ—А–ґ–Є–≤–∞–µ—В —Д—Г–љ–Ї—Ж–Є—О.
–Ш–Љ–µ–µ—В –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ–µ –Ј–љ–∞—З–µ–љ–Є–µ –Ї—А—Г—В—П—Й–µ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞ –Є –Љ–Є–љ–Є–Љ–∞–ї—М–љ—Л–є –Ї—А—Г—В—П—Й–Є–є –Љ–Њ–Љ–µ–љ—В.
–°–Њ–Ј–і–∞–є—В–µ –Ї–∞—А—В—Г –љ–∞—В—П–ґ–µ–љ–Є—П –Є –Ї–∞—А—В—Г —Г–≥–ї–∞ –њ–Њ–≤–Њ—А–Њ—В–∞.
–Ф–Є–∞–Љ–µ—В—А –±–Њ–ї—В–∞ –Љ–Њ–ґ–µ—В –±—Л—В—М –≤–≤–µ–і–µ–љ –≤ —А–µ–Ј—М–±–Њ–≤—Г—О –њ–∞—А—Г –њ–Њ–і–Ї–ї—О—З–µ–љ–Є–є –і–ї—П –≤—Л—З–Є—Б–ї–µ–љ–Є—П –Ј–љ–∞—З–µ–љ–Є—П –њ—А–Њ—З–љ–Њ—Б—В–Є —Г—З–∞—Б—В–Є—П, –∞ –Є–љ–і–µ–Ї—Б –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Њ–є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В–µ–ї—М–љ–Њ—Б—В–Є –Љ–Њ–ґ–µ—В –±—Л—В—М –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є –њ–Њ–ї—Г—З–µ–љ, –Є –Љ–Њ–ґ–µ—В –±—Л—В—М –љ–∞–њ–µ—З–∞—В–∞–љ –њ–Њ–ї–љ—Л–є —В–µ—Б—В–Њ–≤—Л–є –Њ—В—З–µ—В.
–Ю–љ –Є–Љ–µ–µ—В —Д—Г–љ–Ї—Ж–Є—О —Е—А–∞–љ–µ–љ–Є—П —А–µ–Ј—Г–ї—М—В–∞—В–Њ–≤ —В–µ—Б—В–∞ –Є –Љ–Њ–ґ–µ—В –њ–Њ–ї—Г—З–Є—В—М –і–Њ—Б—В—Г–њ –Є –њ—А–Њ—З–Є—В–∞—В—М —А–µ–Ј—Г–ї—М—В–∞—В—Л —В–µ—Б—В–∞, –∞ —В–∞–Ї–ґ–µ –Љ–Њ–ґ–µ—В –њ–Њ–≤—В–Њ—А–Є—В—М –і–∞–љ–љ—Л–µ –Є –Ї—А–Є–≤—Л–µ, –≤–Ї–ї—О—З–∞—П —З–∞—Б—В–Є—З–љ–Њ–µ —Г–≤–µ–ї–Є—З–µ–љ–Є–µ –Є –њ–Њ–≤—В–Њ—А–љ–Њ–µ —А–µ–і–∞–Ї—В–Є—А–Њ–≤–∞–љ–Є–µ –і–∞–љ–љ—Л—Е.
–£—Б–ї–Њ–≤–Є—П –≤—Л–±–Њ—А–Ї–Є –Љ–Њ–≥—Г—В –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є —Е—А–∞–љ–Є—В—М—Б—П, –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є –Њ—В–Њ–Ј–≤–∞—В—М –Є–ї–Є —Б–±—А–Њ—Б–Є—В—М.
–° –Ј–∞—Й–Є—В–Њ–є –Њ—В –њ–µ—А–µ–≥—А—Г–Ј–Ї–Є
–Т—Л —В–∞–Ї–ґ–µ –Љ–Њ–ґ–µ—В–µ —Б–≤—П–Ј–∞—В—М—Б—П —Б–Њ –Љ–љ–Њ–є –њ–Њ —Н–ї–µ–Ї—В—А–Њ–љ–љ–Њ–є –њ–Њ—З—В–µ. –Ь–Њ–є –∞–і—А–µ—Б —Н–ї–µ–Ї—В—А–Њ–љ–љ–Њ–є –њ–Њ—З—В—Л¬†info@shhualong.com
–†–µ–Ї–Њ–Љ–µ–љ–і—Г–µ–Љ—Л–µ –њ—А–Њ–і—Г–Ї—В—Л

LWC-300/500/1000/2000 –≠–ї–µ–Ї—В—А–Њ–≥–Є–і—А–∞–≤–ї–Є—З–µ—Б–Ї–∞—П —В—А–µ—Е—Ж–Є–ї–Є–љ–і—А–Њ–≤–∞—П –Љ–∞—И–Є–љ–∞ –і–ї—П –Є—Б–њ—Л—В–∞–љ–Є—П –љ–∞ –Є–Ј–≥–Є–± —Б —Б–µ—А–≤–Њ–њ—А–Є–≤–Њ–і–Њ–Љ - —Б–µ—А–Є—П LWC

WCJ-20000/50000/100000 –Я–Њ–ї–љ–Њ—Б—В—М—О –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–∞—П –Љ–∞—И–Є–љ–∞ –і–ї—П –Є—Б–њ—Л—В–∞–љ–Є—П –љ–∞ —Г–і–∞—А –њ–∞–і–∞—О—Й–Є–Љ –≥—А—Г–Ј–Њ–Љ –Љ–µ—В–∞–ї–ї–∞ (DWTT) - —Б–µ—А–Є—П WCJ

–†–Њ–±–Њ—В–Є–Ј–Є—А–Њ–≤–∞–љ–љ–∞—П –њ–Њ–ї–љ–Њ—Б—В—М—О –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–∞—П –Љ–∞—П—В–љ–Є–Ї–Њ–≤–∞—П –Љ–∞—И–Є–љ–∞ –і–ї—П —Г–і–∞—А–љ—Л—Е –Є—Б–њ—Л—В–∞–љ–Є–є - —Б–µ—А–Є—П CBD-DR
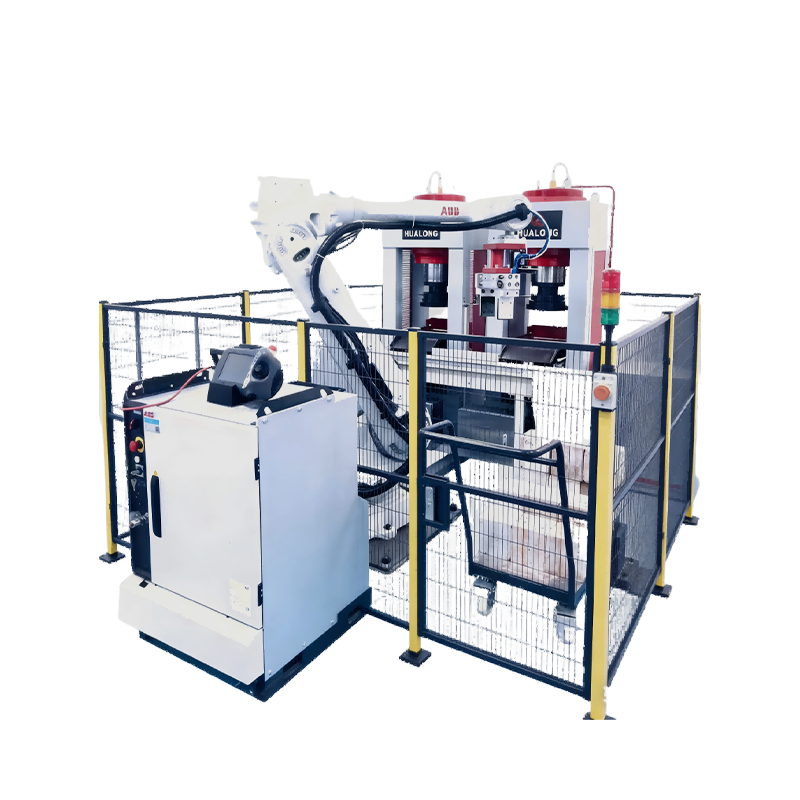
–Я–Њ–ї–љ–Њ—Б—В—М—О –∞–≤—В–Њ–Љ–∞—В–Є–Ј–Є—А–Њ–≤–∞–љ–љ–∞—П —А–Њ–±–Њ—В–Є–Ј–Є—А–Њ–≤–∞–љ–љ–∞—П —Б–Є—Б—В–µ–Љ–∞ –і–ї—П –Є—Б–њ—Л—В–∞–љ–Є–є –љ–∞ –≤—Г–ї–Ї–∞–љ–Є–Ј–∞—Ж–Є—О –Є –њ—А–Њ—З–љ–Њ—Б—В—М –љ–∞ —Б–ґ–∞—В–Є–µ вАФ —Б–µ—А–Є—П WHY-G
–Э—Г–ґ–љ–∞ –њ–Њ–Љ–Њ—Й—М –Є–ї–Є —Г –≤–∞—Б –µ—Б—В—М –≤–Њ–њ—А–Њ—Б?
–Ф–ї—П –њ–Њ–ї—Г—З–µ–љ–Є—П –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–Њ–є –Є–љ—Д–Њ—А–Љ–∞—Ж–Є–Є –Њ —В–Њ–Љ, –Ї–∞–Ї Hualong –Љ–Њ–ґ–µ—В –њ–Њ–Љ–Њ—З—М –≤–∞—И–µ–є –Ї–Њ–Љ–њ–∞–љ–Є–Є –њ–Њ–ї—Г—З–Є—В—М –њ–Њ–ї—Г—З–µ–љ–Є–µ —В–µ—Б—В–Є—А–Њ–≤–∞–љ–Є—П, –љ–∞–ґ–Љ–Є—В–µ –Ї–љ–Њ–њ–Ї—Г.FRIEND LINK:
вДЦ 389 Chuanhong Road, Pudong New Area, Shanghai 201202, –Ъ–Є—В–∞–є
Tel: +86 17821945087
Online Service: 7*24h






© 2018 HUALONG All rights reserved. SiteMap
